一切都来自于在中国购买的中国产品点评网站
一切都来自于在中国购买的中国产品点评网站
这小且价格低廉 GY 521 模块, 连接到 Arduino Uno, 它测量加速度, 由于芯片 M6050 陀螺和磁场. 您可以使用检查定位板,以及一部手机可以告诉 odo 横向或纵向. 或图片.
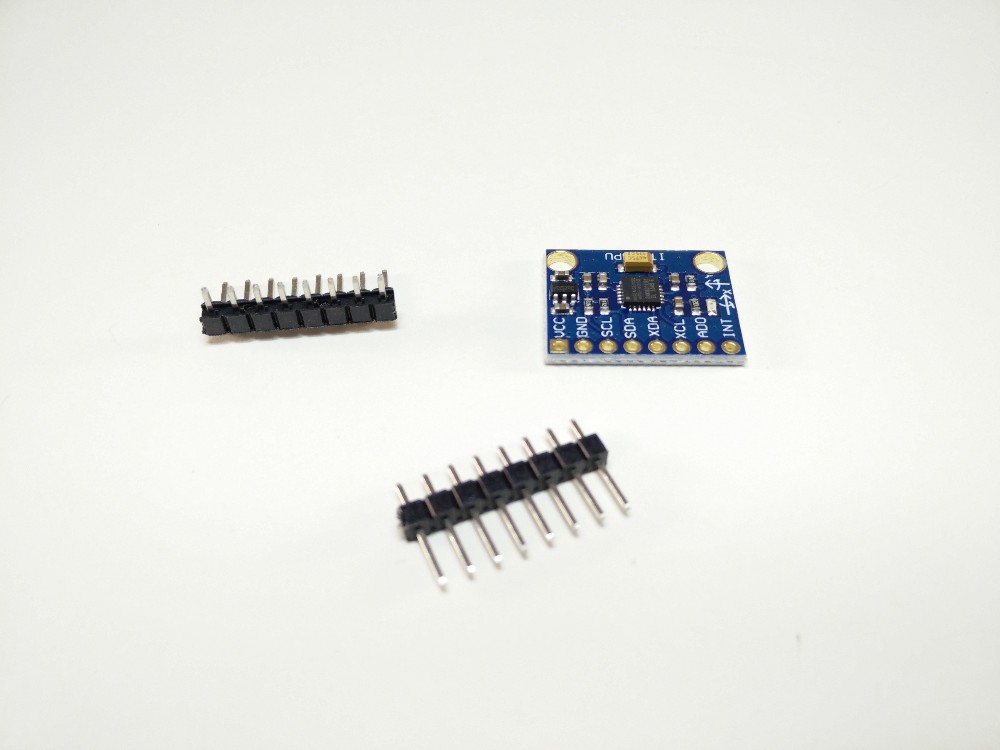
它配备了终端坚持你焊接.

背面是没有芯片. 这些两个小洞用来连接中的模块放在哪里,如果你想要的 X 和 Y 的角度测量 (横滚和俯仰).

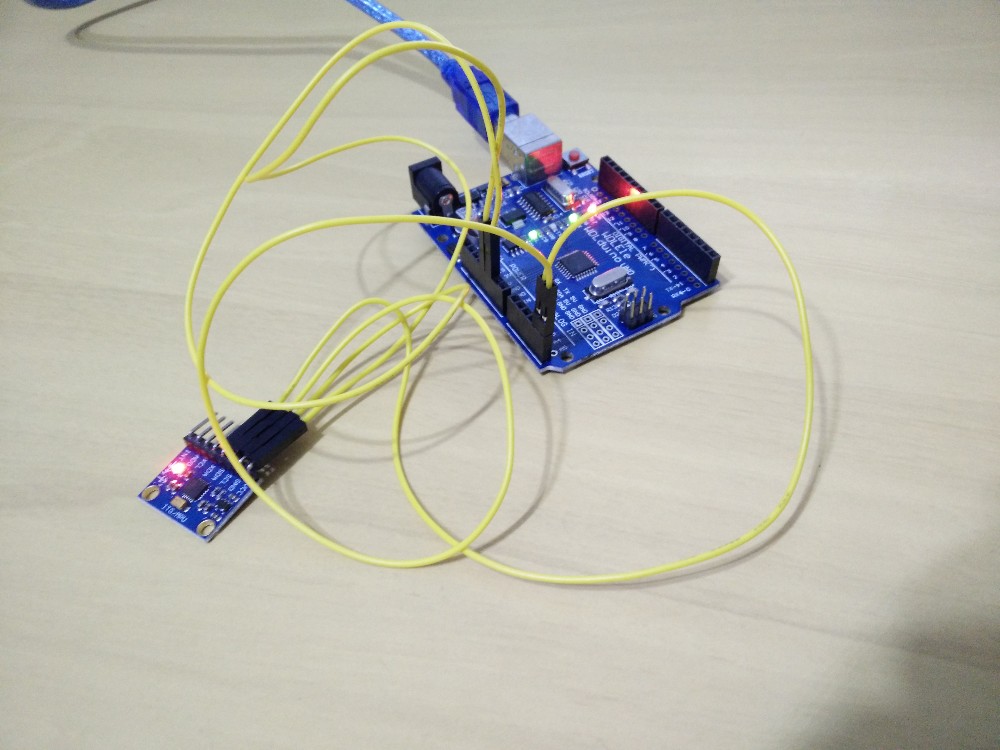
要连接到 Arduino 简单地放置的 GY-521 到 5V VCC, 到 Arduino 和 SDA 和 SCL GND GND 引脚为 A4 和 A5 分别.
现在你必须安装库 FREEIMU, 可以通过下载 此链接. 你应该给它的文档中读取和中的说明 主站点的图书馆. 基本上, 将所有文件都放在目录程序 Arduino 库内的图书馆目录的拉锁.
意外的是附带的库的两个例子, 必须在调用程序中旋转 处理. 你将其发送到 Arduino 的称为 FREEIMU_SERIAL 的库的代码示例和打开程序 FreeIMU_yaw_pitch_roll (或 FreeIMU_cube) 在这种处理内. 然后只需更改下面一行代码来指向串行端口, 对我而言它是 COM12, 但会按计算机而有所不同.
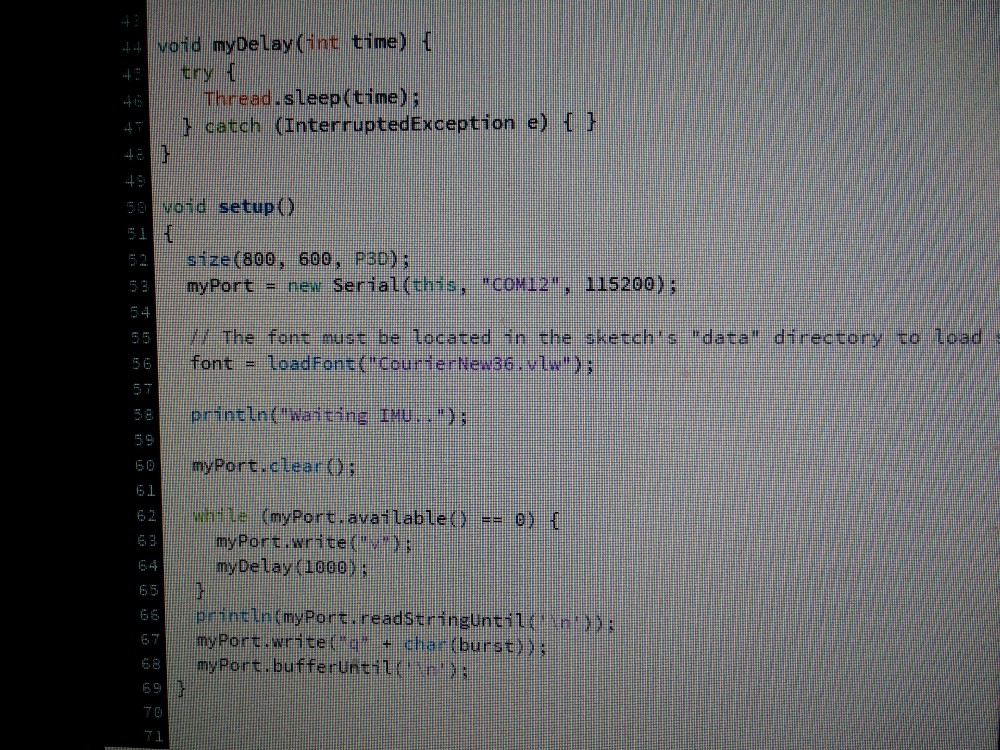
FreeIMU_yaw_pitch_roll 程序的处理需要的数据从 GY 521 (MPU6050) 收到的 USB 串行端口 (由 Arduino 发送) 并以图形方式显示在屏幕上. 请参阅下面的指南针值 (磁强计) 俯仰和滚转和.

现在看看如何也有趣的其他程序 FreeIMU_cube. 我录制的视频显示到:
该模块是廉价和不能指望太多质量. 实际上, 角度值是不稳定,当标签的站, 使任何足够严重的项目. 我想看看为什么这会发生, 但到目前为止还没有找到. 不管怎么说, 我把链接留给 GY 521, 因为它很有趣:
http://www.dx.com/pt/p/gy-521-mpu6050-3-axis-acceleration-gyroscope-6dof-module-blue-154602